Shop Solver
For instructions on how to use the Define Commands, please click here.
Define Point
A point defines
an exact position in space. The position is represented by its
XYZ coordinate. A point may be defined by any of the following:
Rectangular Coordinates
Intersection of 2 Lines
Intersection of a Line and a Circle
Intersection of 2 Circles
On a Circle at an Angle With the X Axis
Center of a Circle
Intersection of 3 Planes
Polar Coordinates
Location in a Pattern
Radius and Rotation Around Another Point
On a Circle at an Angle With a Point on the Circle
Intersection of a Line and an Ellipse
Intersection of a Line and a Hyperbola
Rotation About Axes
Intersection of a Line and a Plane
Intersection of a Line and a Sphere
Intersection of a Line and a Cylinder
Rectangular Coordinates
POINT/x-coord,y-coord,z-coord
The point is defined by the given x-, y- and z-coordinate.
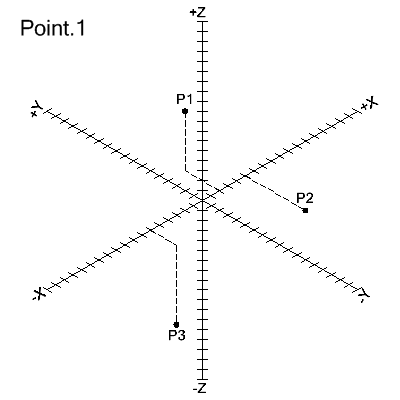
P1=POINT/2.0,4.0,6.0
P2=POINT/5.0,-7.0,0
P3=POINT/-6.0,-3.0,-8.0
Intersection of 2 Lines
POINT/INTOF,line1,line2
The point is defined as the intersection of line1 with line2.
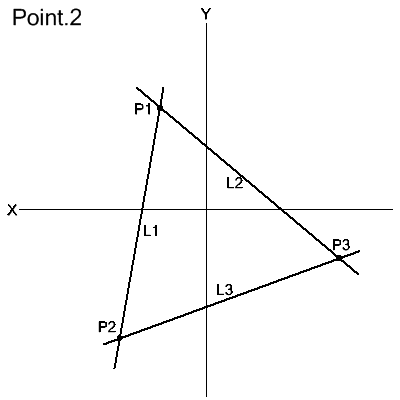
P1=POINT/INTOF,L1,L2
P2=POINT/INTOF,L1,L3
P3=POINT/INTOF,L2,L3
Intersection of a Line and a Circle
POINT/modifier,INTOF,line,circle
modifier: XLARGE | XSMALL | YLARGE | YSMALL
The point is defined as the intersection of line with circle.
There are 2 intersections unless the line is tangent with the
circle. The modifier defines which point of intersection is
desired relative to the other possible point (see below).
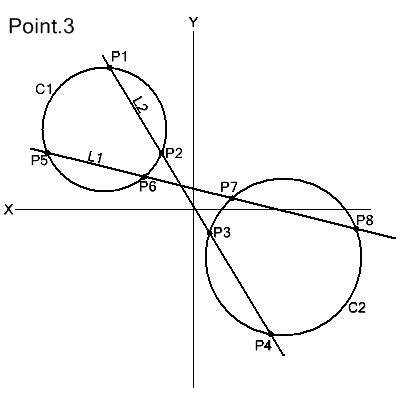
P1=POINT/YLARGE,INTOF,L2,C1
P2=POINT/XLARGE,INTOF,L2,C1
P3=POINT/XSMALL,INTOF,L2,C2
P4=POINT/YSMALL,INTOF,L2,C2
P5=POINT/YLARGE,INTOF,L1,C1
P6=POINT/XLARGE,INTOF,L1,C1
P7=POINT/XSMALL,INTOF,L1,C2
P8=POINT/YSMALL,INTOF,L1,C2
When
a definition statement can possibly return more than one geometric, the
modifiers *LARGE and *SMALL, where * is an axis designation of X, Y
or Z, specifies which geometric to return:
- XLARGE: Return the geometric with the largest X-value
- XSMALL: Return the geometric with the smallest X-value
- YLARGE: Return the geometric with the largest Y-value
- YSMALL: Return the geometric with the smallest Y-value
- ZLARGE: Return the geometric with the largest Z-value
- ZSMALL: Return the geometric with the smallest Z-value
The
modifiers are also used to describe the directional displacement of
where one geometric crosses the X-, Y- or Z-axis relative to
another geometric. This is accomplished by comparing the X, Y or
Z intercepts of the geometrics. For example, line L1 is YLARGE to
line L2 when the Y-intercept of L1 is greater than the Y-intercept of
L2.
Intersection of 2 Circles
POINT/modifier,INTOF,circle1,circle2
modifier: XLARGE | XSMALL | YLARGE | YSMALL
The point is defined as the intersection of circle1 with circle2.
There are 2 intersections unless circle1 is tangent with circle2.
The modifier defines which point of intersection is desired relative
to the other possible point.
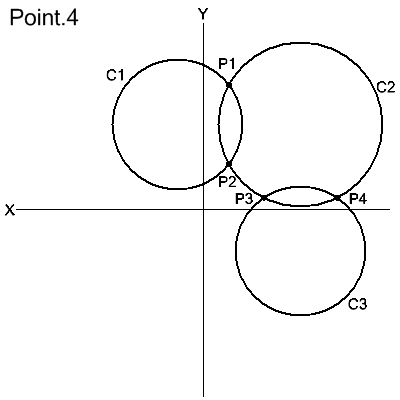
P1=POINT/YLARGE,INTOF,C1,C2
P2=POINT/YSMALL,INTOF,C1,C2
P3=POINT/XSMALL,INTOF,C2,C3
P4=POINT/XLARGE,INTOF,C2,C3
The directional modifiers are defined here.
On a Circle at an Angle With the X Axis
POINT/circle,ATANGL,angle
The point is defined as the intersection of circle with a radial line emanating from the center of circle. Angle is measured from the circle's positive x-axis.
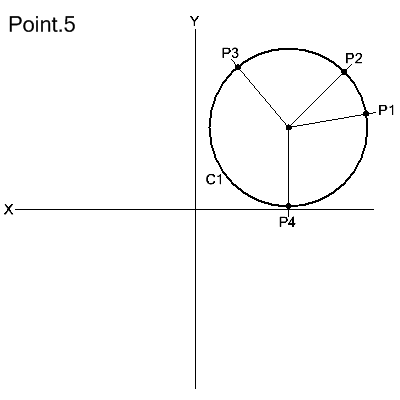
P1=POINT/C1,ATANGL,10
P2=POINT/C1,ATANGL,45
P3=POINT/C1,ATANGL,110
P4=POINT/C1,ATANGL,270
or
P1=POINT/C1,ATANGL,-350
P2=POINT/C1,ATANGL,-315
P3=POINT/C1,ATANGL,-250
P4=POINT/C1,ATANGL,-90
Center of a Circle
POINT/CENTER,circle
The point is defined as the center of circle.
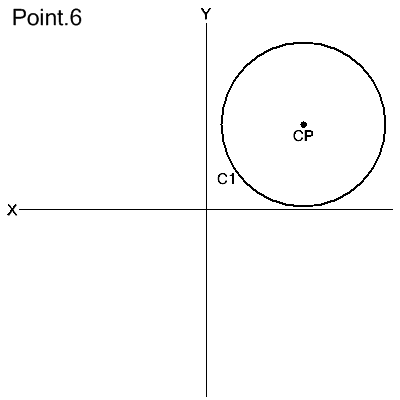
CP=POINT/CENTER,C1
Intersection of 3 Planes
POINT/INTOF,plane1,plane2,plane3
The point is defined as the intersection of plane1, plane2, and plane3.
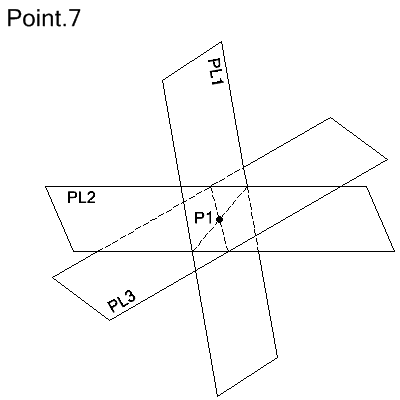
P1=POINT/INTOF,PL1,PL2,PL3
Polar Coordinates
POINT/RTHETA,modifier,radius,angle
modifier: XYPLAN | YZPLAN | ZXPLAN
The point is defined by polar coordinates radius and angle.
The modifier specifies in which plane the polar coordinates
apply. Angles are measured from the positive X-axis when XYPLAN
or ZXPLAN is specified, and from the positive Y-axis when YZPLAN is
specified.
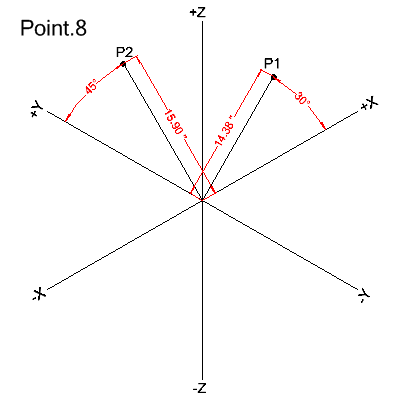
P1=POINT/RTHETA,XYPLAN,14.38,30.0
P2=POINT/RTHETA,YZPLAN,15.9,45.0
Location in a Pattern
POINT/pattern,n
The point is defined as the nth point in a pattern. The first point is number 1.
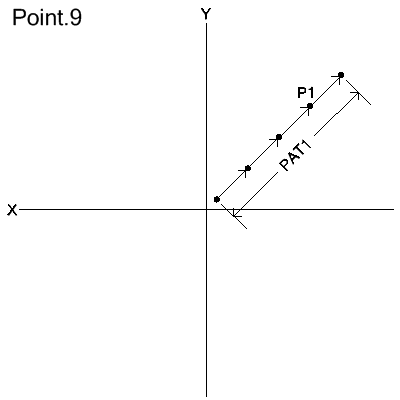
P1=POINT/PAT1,4
Rotation About Axes
Not a valid APT definition.
POINT/ROTATE,point,theta,alpha,beta
The point is defined by rotating point around the X and/or Y and/or Z axes. Theta specifies the angle of rotation around the Z-axis; alpha around the X-axis; beta around the Y-axis.
P1=POINT/1,1,1
P2::POINT/ROTATE,P1,45.0,54.7356,0
Intersection of a Line and a Plane
Not a valid APT definition.
POINT/INTOF,line,plane
The point is defined as the intersection of line with plane.
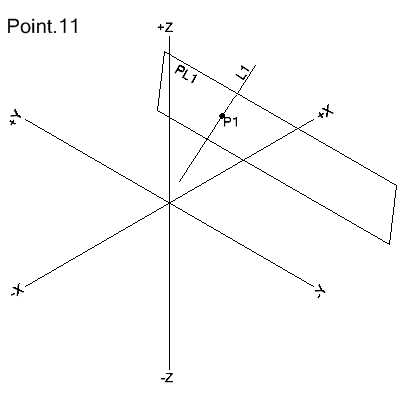
P1::POINT/INTOF,L1,PL1
Intersection of a Line and an Ellipse
POINT/modifier,INTOF,line,ellipse
modifier: XLARGE | XSMALL | YLARGE | YSMALL
The point is defined as the intersection of line with ellipse.
There are 2 intersections unless the line is tangent with the ellipse.
The modifier defines which point of intersection is desired relative
to the other possible point.
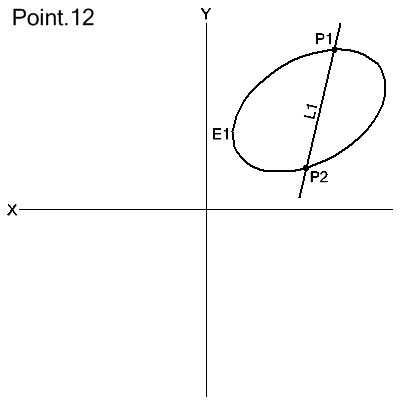
P1::POINT/YLARGE,INTOF,L1,E1
P2::POINT/XSMALL,INTOF,L1,E1
The directional modifiers are defined here.
Intersection of a Line and a Hyperbola
POINT/modifier,INTOF,line,hyperbola
modifier: XLARGE | XSMALL | YLARGE | YSMALL
The point is defined as the intersection of line with hyperbola.
There are 2 intersections unless the line is tangent with the hyperbola.
The modifier defines which point of intersection is desired relative
to the other possible point.
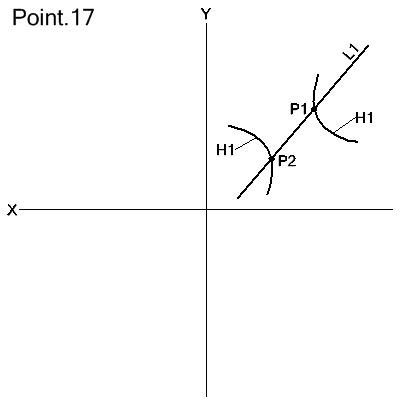
P1::POINT/YLARGE,INTOF,L1,H1
P2::POINT/XSMALL,INTOF,L1,H1
The directional modifiers are defined here.
Intersection of a Line and a Sphere
Not a valid APT definition.
POINT/modifier,INTOF,line,sphere
modifier: XLARGE | XSMALL | YLARGE | YSMALL | ZLARGE | ZSMALL
The point is defined as the intersection of line with sphere.
There are 2 intersections unless the line is tangent with the sphere.
The modifier defines which point of intersection is desired relative
to the other possible point.
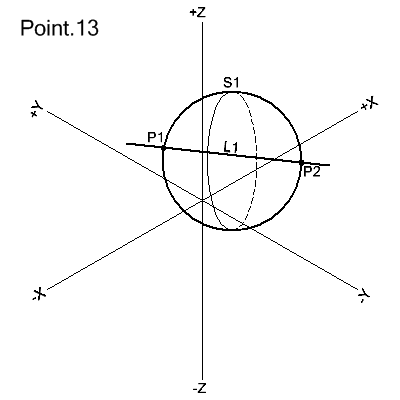
P1::POINT/XSMALL,INTOF,L1,S1
P2::POINT/ZLARGE,INTOF,L1,S1
The directional modifiers are defined here.
Intersection of a Line and a Cylinder
Not a valid APT definition.
POINT/modifier,INTOF,line,cylinder
modifier: XLARGE | XSMALL | YLARGE | YSMALL | ZLARGE | ZSMALL
The point is defined as the intersection of line with cylinder.
There are 2 intersections unless the line is tangent with the cylinder.
The modifier defines which point of intersection is desired relative
to the other possible point.
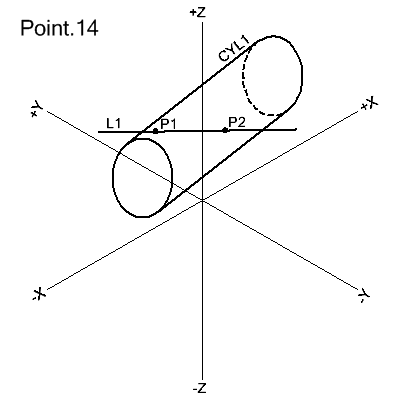
P1::POINT/XSMALL,INTOF,L1,CYL1
P2::POINT/ZLARGE,INTOF,L1,CYL1
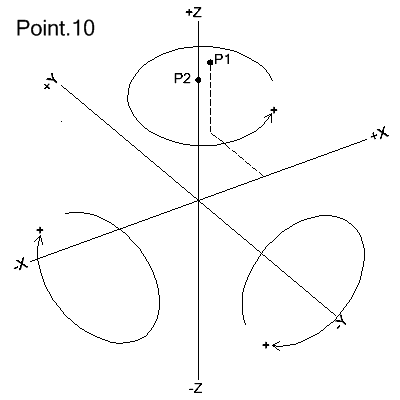
Radius and Rotation Around Another Point
POINT/point,RADIUS,radius,ATANGL,angle
The point is defined in the XY plane by the polar coordinates radius and angle with respect to point rather than the XY origin.
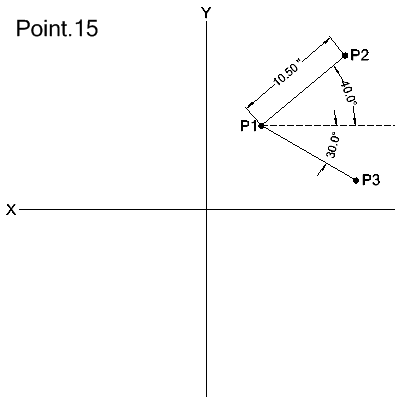
P2::POINT/P1,RADIUS,10.5,ATANGL,40.0
P3::POINT/P1,RADIUS,10.5,ATANGL,-30.0
On a Circle at an Angle With a Point on the Circle
POINT/point,DELTA,direction,ON,circle,ATANGL,angle
direction: CCLW | CLW
The point is defined as being on circle at an angular distance of angle from point. Point is a reference point on circle. The angular direction is specified as clockwise (CLW) or counter-clockwise (CCLW).
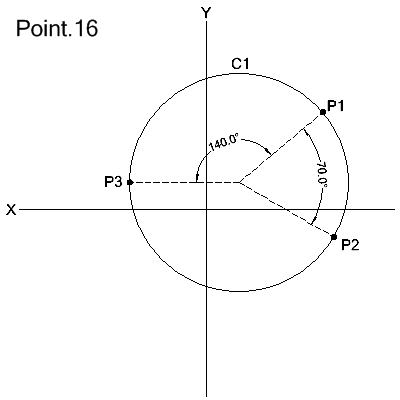
P2::POINT/P1,DELTA,CLW,ON,C1,ATANGL,70.0
P3::POINT/P1,DELTA,CCLW,ON,C1,ATANGL,140.0