Shop Solver
For instructions on how to use the Define Commands, please click here.
Define Circle
A circle is the
set of all points in a plane that are equidistant from a given point,
the center. The distance from the center to any point on the
circle is the radius. A circle may be defined by any of the
following:
Coordinates of the Center and the Radius
Center Point and Radius
Center and a Line to Which it is Tangent
Center and a Point on the Circumference
Through 3 Points on the Circumference
Center Point and Tangent to a Circle
Radius and Tangent to 2 Intersecting Lines
Radius and Tangent to a Line and Passing Through a Point
Radius and Tangent to a Line and a Circle
Radius and Tangent to 2 Circles
Through 2 Points and the Radius
Tangent to 3 Lines
Tangent to 2 Lines and a Circle
Radius, a Point on the Circumference and Tangent to a Circle
Intersection of a Plane and a Sphere
Coordinates of the Center and the Radius
CIRCLE/x-coord,y-coord,z-coord,radius
The circle is defined with its center at the x, y, z coordinate, and by its radius.
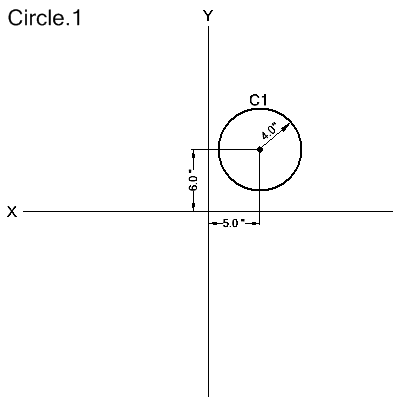
C1=CIRCLE/5.0,6.0,0,4.0
Center Point and Radius
CIRCLE/CENTER,point,RADIUS,radius
The circle is defined with its center at point, and by its radius.
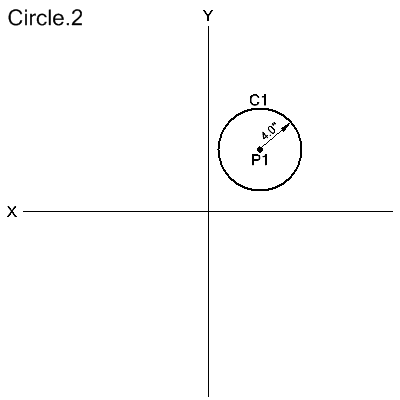
C1=CIRCLE/CENTER,P1,RADIUS,4.0
Center and a Line to Which it is Tangent
CIRCLE/CENTER,point,TANTO,line
The circle is defined with its center at point and tangent to line.
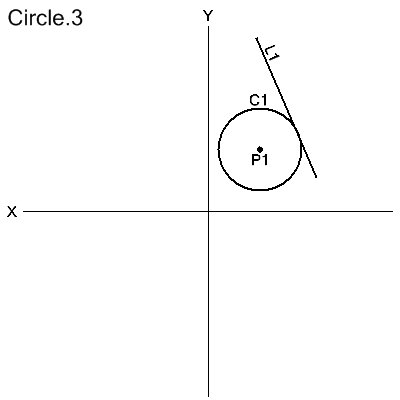
C1=CIRCLE/CENTER,P1,TANTO,L1
Center and a Point on the Circumference
CIRCLE/CENTER,point1, point2
The circle is defined with its center at point1 and passing through point2.
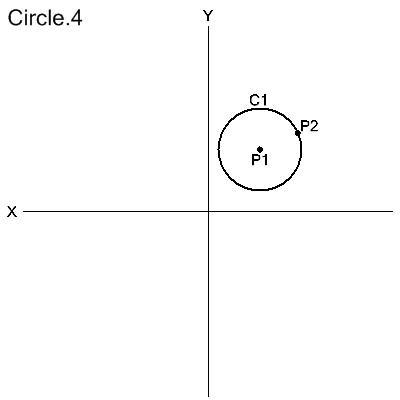
C1=CIRCLE/CENTER,P1,P2
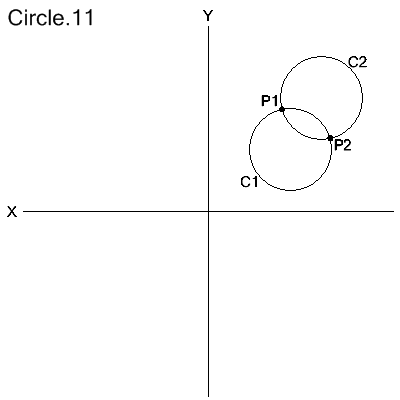
Through 3 Points on the Circumference
CIRCLE/point1,point2,point3
The circle is defined as passing through the 3 non-collinear points point1, point2 and point3.
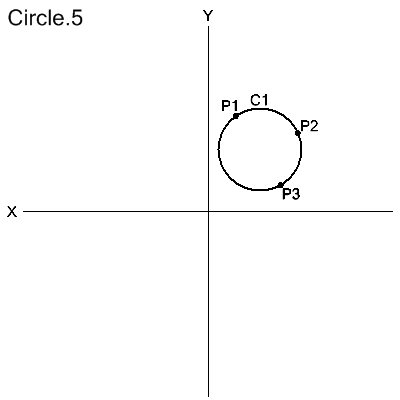
C1=CIRCLE/P1,P2,P3
Center Point and Tangent to a Circle
CIRCLE/CENTER,point,modifier,TANTO,circle
modifier: LARGE | SMALL
Th circle is defined with its center at point and tangent to circle.
The modifier means that the circle being defined is either the
larger or the smaller of the 2 possible solution circles, unless the
given point is also the center of the given circle. In that case the modifier is immaterial.
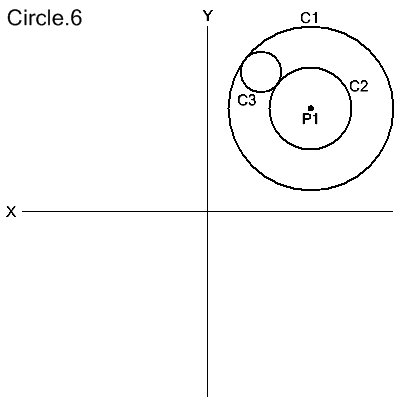
C1=CIRCLE/CENTER,P1,LARGE,TANTO,C3
C2=CIRCLE/CENTER,P1,SMALL,TANTO,C3
Radius and Tangent to 2 Intersecting Lines
CIRCLE/modifier1,line1,modifier2,line2,RADIUS,radius
modifier1: XLARGE | XSMALL | YLARGE | YSMALL
modifier2: XLARGE | XSMALL | YLARGE | YSMALL
The circle is defined as tangent to 2 lines with the given radius.
Four possible solution circles exist and the 2 modifiers define
which circle is defined. The unique solution circle whose center
meets the criteria of the 2 modifiers is selected.
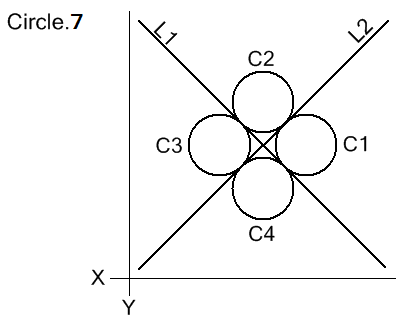
C1=CIRCLE/YLARGE,L1,YSMALL,L2,RADIUS,2.071
C2=CIRCLE/XLARGE,L1,XSMALL,L2,RADIUS,2.071
C3=CIRCLE/YSMALL,L1,YLARGE,L2,RADIUS,2.071
C4=CIRCLE/XLARGE,L2,XSMALL,L1,RADIUS,2.071
The directional modifiers are defined here.
Radius and Tangent to a Line and Passing Through a Point
CIRCLE/TANTO,line,modifier,point,RADIUS,radius
modifier: XLARGE | XSMALL | YLARGE | YSMALL
The circle is defined as tangent to line and passing through point, and with the given radius.
There are 2 possible solution circles and the modifier defines
which circle's center satisfies the criteria with respect to the given
point.
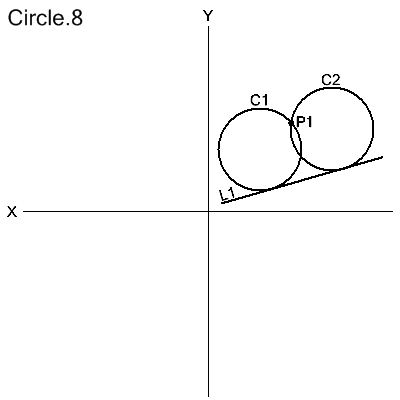
C1=CIRCLE/TANTO,L1,XSMALL,P1,RADIUS,4.0
C2=CIRCLE/TANTO,L1,XLARGE,P1,RADIUS,4.0
or
C1=CIRCLE/TANTO,L1,YSMALL,P1,RADIUS,4.0
C2=CIRCLE/TANTO,L1,YLARGE,P1,RADIUS,4.0
The directional modifiers are defined here.
Radius and Tangent to a Line and a Circle
CIRCLE/modifier1,line,modifier2,modifier3,circle,RADIUS,radius
modifier1: XLARGE | XSMALL | YLARGE | YSMALL
modifier2: XLARGE | XSMALL | YLARGE | YSMALL
modifier3: IN | OUT
The defined circle is tangent to both line and circle, and with the given radius.
There are 8 possible solution circles. Modifier1 describes
where the center of the defined circle is in relation to the given line. Modifier3 describes whether the center of the defined circle is inside or outside of the given circle.
Modifier2 selects which of the 2 final possible solution circle
centers meets the criteria with respect to the center of the given circle.
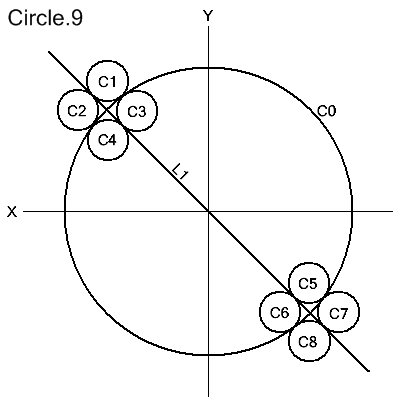
C1=CIRCLE/YLARGE,L1,XSMALL,OUT,C0,RADIUS,2.0
C2=CIRCLE/XSMALL,L1,XSMALL,OUT,C0,RADIUS,2.0
C3=CIRCLE/XLARGE,L1,YLARGE,IN,C0,RADIUS,2.0
C4=CIRCLE/XSMALL,L1,YLARGE,IN,C0,RADIUS,2.0
C5=CIRCLE/YLARGE,L1,XLARGE,IN,C0,RADIUS,2.0
C6=CIRCLE/YSMALL,L1,XLARGE,IN,C0,RADIUS,2.0
C7=CIRCLE/XLARGE,L1,XLARGE,OUT,C0,RADIUS,2.0
C8=CIRCLE/XSMALL,L1,YSMALL,OUT,C0,RADIUS,2.0
The directional modifiers are defined here.
Radius and Tangent to 2 Circles
CIRCLE/modifier1,modifier2,circle1,modifier3,circle1,RADIUS,radius
modifier1: XLARGE | XSMALL | YLARGE | YSMALL
modifier2: IN | OUT
modifier3: IN | OUT
The defined circle is tangent to the given circles circle1 and circle2 with the given radius.
The second and third modifiers are applied first. Modifier
IN is used if either the given circle or the defined
circle is inside the other. Otherwise modifier OUT is used. The first modifier applies when
there are 2 possible solution circles and selects the circle whose
center meets the criteria when compared with the other possible
solution circle. Otherwise it is immaterial.
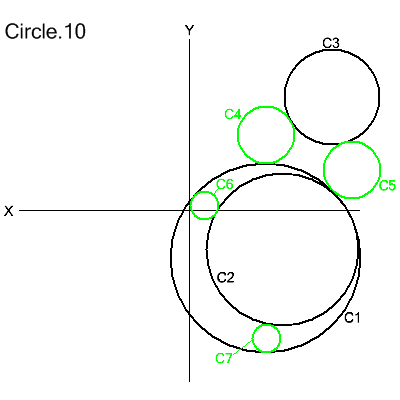
C4=CIRCLE/YLARGE,OUT,C1,OUT,C3,RADIUS,3.0
C5=CIRCLE/YSMALL,OUT,C1,OUT,C3,RADIUS,3.0
C6=CIRCLE/XSMALL,IN,C1,OUT,C2,RADIUS,1.5
C7=CIRCLE/XLARGE,IN,C1,OUT,C2,RADIUS,1.5
The directional modifiers are defined here.
Through 2 Points and the Radius
CIRCLE/modifier,point1,point2,RADIUS,radius
modifier: XLARGE | XSMALL | YLARGE | YSMALL
The defined circle passes through point1 and point2 with the given radius. There are 2 possible solution circles and the modifier selects the circle whose center meets the criteria.
C1::CIRCLE/XSMALL,P1,P2,RADIUS,4.0
C2::CIRCLE/YLARGE,P1,P2,RADIUS,4.0
The directional modifiers are defined here.
Tangent to 3 Lines
CIRCLE/modifier1,line1,modifier2,line2,modifier3,line3
modifier1: XLARGE | XSMALL | YLARGE | YSMALL
modifier2: XLARGE | XSMALL | YLARGE | YSMALL
modifier3: XLARGE | XSMALL | YLARGE | YSMALL
The defined circle is tangent to line1, line2 and line3.
All 3 lines cannot be parallel and none can be collinear with
another. Each line is associated with the modifier which precedes
it.
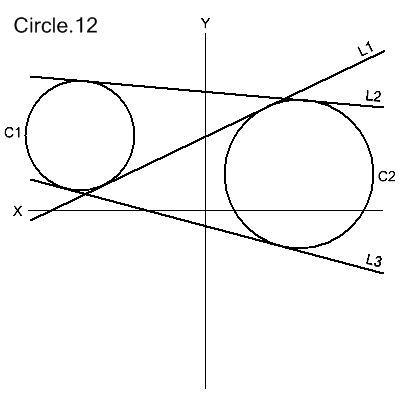
C1::CIRCLE/YLARGE,L1,XSMALL,L2,YLARGE,L3
C2::CIRCLE/YSMALL,L1,YSMALL,L2,XLARGE,L3
The directional
modifiers apply to the 2 possible locations of the circle's center
point. The directional modifiers are defined here.
Tangent to 2 Lines and a Circle
CIRCLE/modifier1,TANTO,line1,modifier2,TANTO,line2,modifier3,modifier4,TANTO,circle
modifier1: XLARGE | XSMALL | YLARGE | YSMALL
modifier2: XLARGE | XSMALL | YLARGE | YSMALL
modifier3: XLARGE | XSMALL | YLARGE | YSMALL
modifier4: IN | OUT
The defined circle is tangent to lines line1 and line2 and to circle. Modifiers
1 and 2 specify the location of the defined circle's center in
relation to the given lines. Modifier 4 specifies the location of
the defined circle's center in relation to the given circle.
Modifier 3 is used as a tie-breaker in case there are 2 possible
solution circles after the other modifiers are applied (see Figure Circle.13a below).
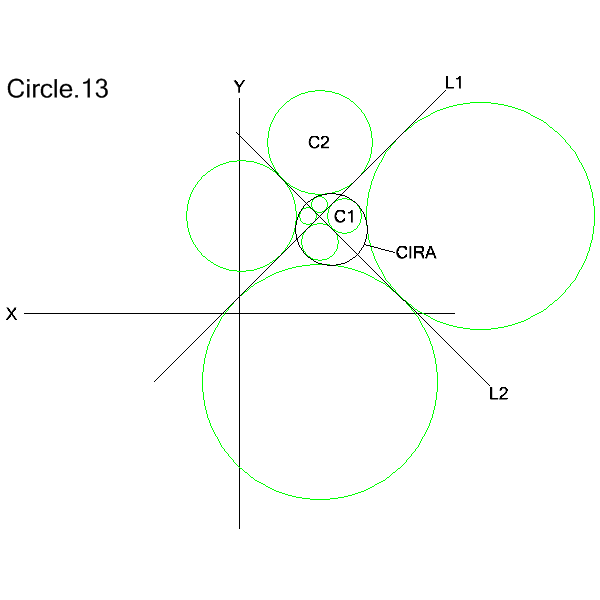
C1=CIRCLE/YSMALL,TANTO,L1,YLARGE,TANTO,L2,XLARGE,IN,TANTO,CIRA
C2=CIRCLE/YLARGE,TANTO,L1,YLARGE,TANTO,L2,YSMALL,OUT,TANTO,CIRA
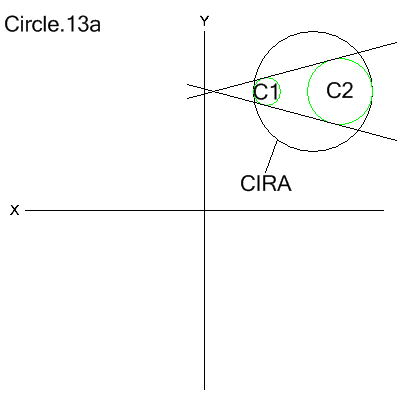
Figure
Circle.13a depicts 2 possible solution circles after modifiers 1, 2 and
4 have been applied. In the figure above modifier 3 (XLARGE or XSMALL in this case)
is used as a tie-breaker to select the required solution circle. Otherwise modifier 3 is immaterial.
The directional modifiers are defined here.
Radius, a Point on the Circumference and Tangent to a Circle
CIRCLE/modifier1,modifier2,TANTO,circle,THRU,point,RADIUS,radius
modifier1: XLARGE | XSMALL | YLARGE | YSMALL
modifier2: LEFT | RIGHT
The defined circle is tangent to circle, passes through point, and has the given radius. The modifiers are explained below.
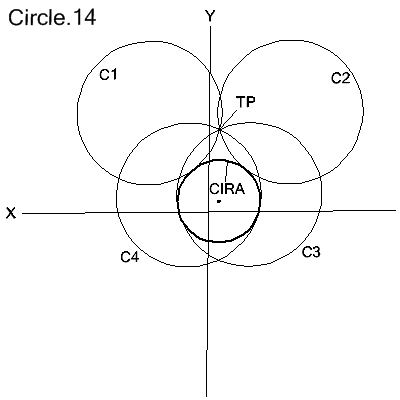
C1=CIRCLE/YLARGE,RIGHT,TANTO,CIRA,THRU,TP,RADIUS,7.0
C2=CIRCLE/XLARGE,LEFT,TANTO,CIRA,THRU,TP,RADIUS,7.0
C3=CIRCLE/XSMALL,LEFT,TANTO,CIRA,THRU,TP,RADIUS,7.0
C4=CIRCLE/YSMALL,RIGHT,TANTO,CIRA,THRU,TP,RADIUS,7.0
Modifier2
specifies the location of the center of the defined circle relative to
a line passing through the point and the center of the given circle.
The sense of direction (left or right) is achieved by looking
from the point toward the center of the given circle.
Modifier1 applies to the 2 possible locations of the circle's center
point after Modifier2 is applied. The directional modifiers are defined here.
A definition may have 1, 2, 3 or 4 possible solutions, depending
upon the attributes provided. The two positional modifiers are
not always applicable for every definition.
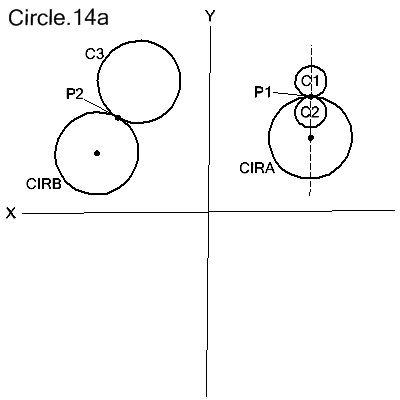
Example
1: In figure Circle.14a below the centers of C1 and C2 lie on the
line passing through P1 and the center point of CIRA. Therefore
only Modifier1 is applicable as there is no sense of left or right
between the 2 possible solutions.
Example
2: In figure Circle.14a below circles C3 and CIRB have the same
radius. Therefore there is only 1 solution and neither positional
modifier is applicable.
To
summarize: If the definition has 1 possible solution then neither
modifier is applicable. If the definition has 2 possible
solutions then only 1 of the modifiers is applicable. If the
definition has 3 or 4 possible solutions then both modifiers are
applicable.
Intersection of a Plane and a Sphere
Not a valid APT definition. Inclined
circles resulting from this definition are for reference only.
They cannot be used by any other definitions or in any
calculations.
CIRCLE/INTOF,plane,sphere
The defined circle is formed by the intersection of the given plane and sphere.
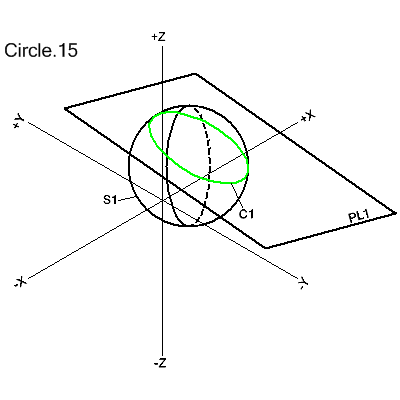
C3::CIRCLE/INTOF,PL1,S1